AOI: High Power Energy Conversion
Innovation:
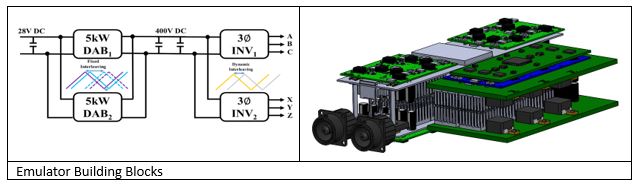
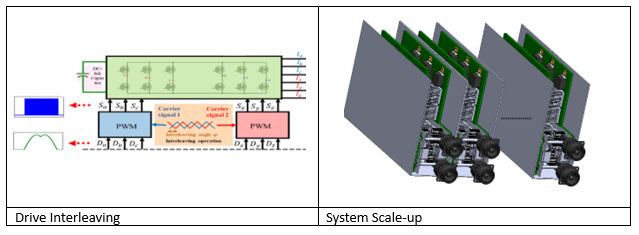
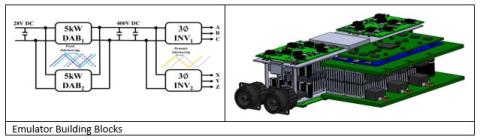
A Direct Current Emulator (DCE) that can operate as a programmable DC power supply (source) and a DC load (sink) is of particular interest to many electrical system Hardware-In-the-Loop (HIL) applications, such as avionics, automotive, and space power. To meet the requirements of a DCE for these HIL applications, we are proposing the development of a modular and scalable high bandwidth bidirectional DCE that uses a novel parallel interleaved GaN-based DC/DC Dual Active Bridge (DAB) converter topology as the basic building block of the DCE. This building block includes Zero Voltage Switching (ZVS) operations to minimize switching losses, high-performance control algorithms to achieve the desired levels of real-time performance and model fidelity with the DCE, and transformer and switch currents that have been analyzed to optimize the design and minimize losses. The basic building block can dynamically source or sink 10kW by connecting each of the 3-phase 5kW inverters to a 208V AC source. A unique feature of the building block is that by connecting only one inverter to a 208V AC source, the other inverter can be controlled as a 5kW AC Emulator (ACE) to expand the utility of the Emulator for HIL experiments. These modular building blocks can be combined in a self-contained chassis to scale the overall unit by connecting the building blocks in different series and parallel configurations to meet the needs of a variety of different DCE and ACE HIL applications. The overall unit will be hand-movable and can be air-cooled at an approximate cost of $1/kW.
Objective:
This project proposes to develop a lightweight, compact, high bandwidth DC emulator for Digital Engineering Systems.
Background:
As electrical systems become more complex, the importance of understanding subsystem interactions is crucial to guarantee the system can meet the performance objectives and to ensure system resilience and stability during transient events. Integrating subsystem components early in the development process allows for efficient detection and correction of destabilizing interactions. Early integration can be difficult when the development timelines of hardware components are different, resulting in only a portion of the available system components for integrated testing early in the systems design process. In addition, earlier hardware integration may be infeasible due to resource or laboratory limitations. This is where hardware-in-the-loop (HIL) can provide the necessary tools to facilitate early integration of subsystem components into the overall system architecture by utilizing real-time models coupled with emulator hardware to represent unavailable hardware components. HIL is a Digital Engineering (DE) approach that leverages the interconnection of digital models and physical hardware for conducting real-time experiments in a controlled laboratory environment.
There are multiple requirements for developing an accurate and useful emulation system (real-time model + emulator hardware) for use in HIL experimentation. First, the real-time model must accurately represent the system or component by containing a level of detail sufficient for the testing that is being done. Meaning if large signal dynamics are the only concern, then an average-value model may be sufficient, which requires reduced real-time computational resources as well as model development time. On the other hand, if small-signal or fast dynamics and transient response need to be captured in the model, then the required real-time computational resources and the model development time greatly increase.
As fidelity requirements are added to a real-time model, additional constraints are imposed on the emulator hardware. Most notably is the emulator’s closed-loop bandwidth, or its ability to track commands provided by the real-time model. This not only includes the converter hardware and architecture the emulator uses but also the control rate and the latency of the communication interface used to receive real-time commands for the entire HIL system. Poor performance in any of these facets will result in an overall poor performing real-time emulation system and therefore, all interfaces, both analog and digital, must be considered when choosing emulator hardware.